Galilean transformation
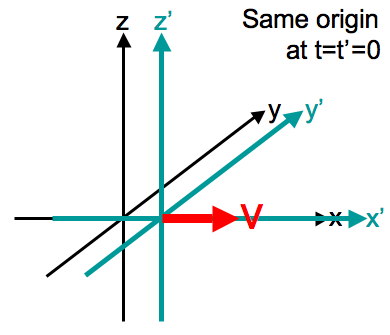
In physics, a Galilean transformation is used to transform between the coordinates of two reference frames which differ only by constant relative motion within the constructs of Newtonian physics. These transformations together with spatial rotations and translations in space and time form the inhomogeneous Galilean group (assumed throughout below). Without the translations in space and time the group is the homogeneous Galilean group. The Galilean group is the group of motions of Galilean relativity acting on the four dimensions of space and time, forming the Galilean geometry. This is the passive transformation point of view. In special relativity the homogenous and inhomogenous Galilean transformations are, respectively, replaced by the Lorentz transformations and Poincaré transformations; conversely, the group contraction in the classical limit c → ∞ of Poincaré transformations yields Galilean transformations.
The equations below are only physically valid in a Newtonian framework, and not applicable to coordinate systems moving relative to each other at speeds approaching the speed of light.
Galileo formulated these concepts in his description of uniform motion.[1]
The topic was motivated by his description of the motion of a ball rolling down a ramp, by which he measured the numerical value for the acceleration of gravity near the surface of the Earth.
anisotropic transformations.

isochronous transformations.

spatial Euclidean transformations.

uniformly special transformations / homogenous transformations, isomorphic to Euclidean transformations.

shifts of origin / translation in Newtonian spacetime.

rotations (of reference frame) (see ), a compact group.

SO(3)
uniform frame motions / boosts.

Two Galilean transformations G(R, v, a, s) and G(R' , v′, a′, s′) compose to form a third Galilean transformation,
The set of all Galilean transformations Gal(3) forms a group with composition as the group operation.
The group is sometimes represented as a matrix group with spacetime events (x, t, 1) as vectors where t is real and x ∈ R3 is a position in space.
The action is given by[7]
where s is real and v, x, a ∈ R3 and R is a rotation matrix.
The composition of transformations is then accomplished through matrix multiplication. Care must be taken in the discussion whether one restricts oneself to the connected component group of the orthogonal transformations.
Gal(3) has named subgroups. The identity component is denoted SGal(3).
Let m represent the transformation matrix with parameters v, R, s, a:
The parameters s, v, R, a span ten dimensions. Since the transformations depend continuously on s, v, R, a, Gal(3) is a continuous group, also called a topological group.
The structure of Gal(3) can be understood by reconstruction from subgroups. The semidirect product combination () of groups is required.
